Andreas Kriegler

andreas.kriegler@tuwien.ac.at
Giefinggasse 4
1210 Vienna, Austria
I am a PhD Student in Computer Vision in the CVL at Technical University of Vienna (TU Wien), supervised by Margrit Gelautz. I am funded by the Austrian Institute of Technology (AIT), where I am further advised by Csaba Beleznai.
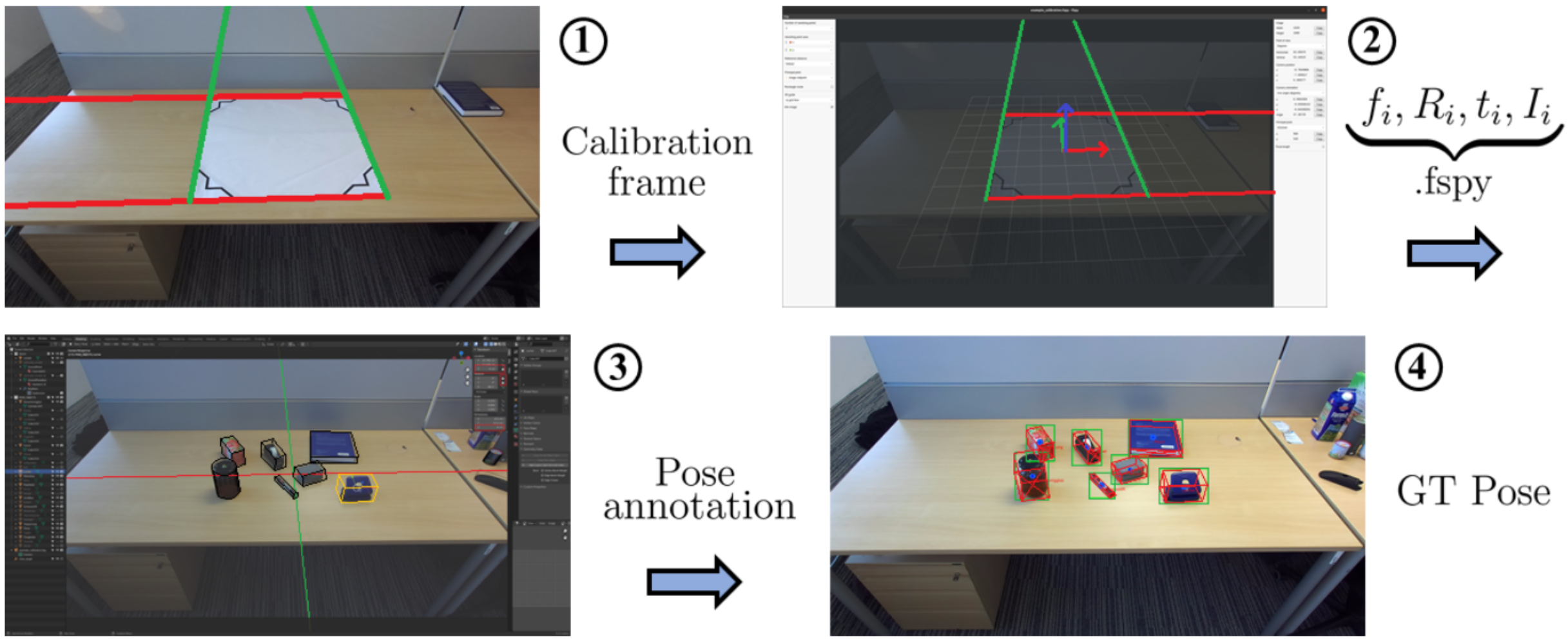
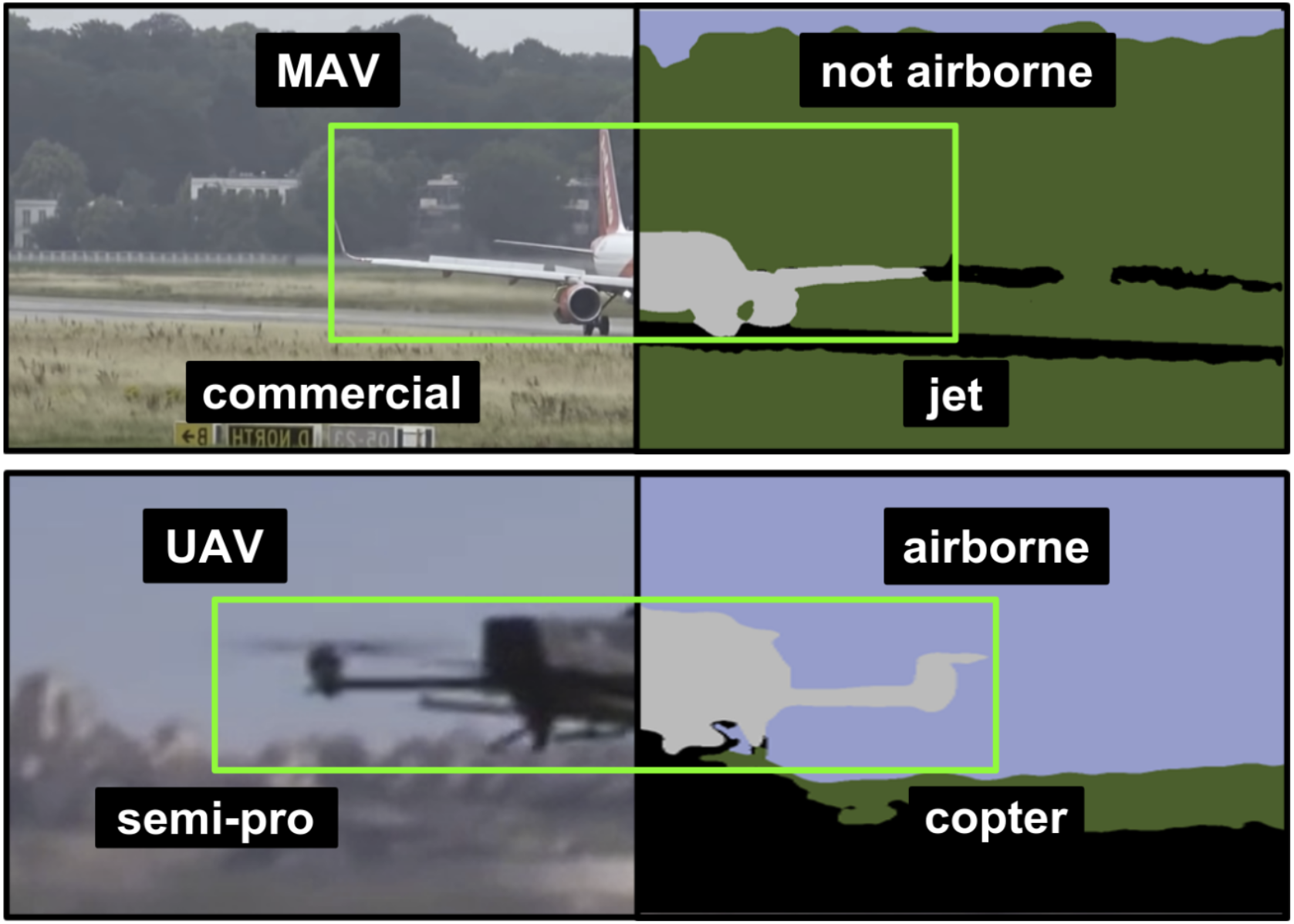
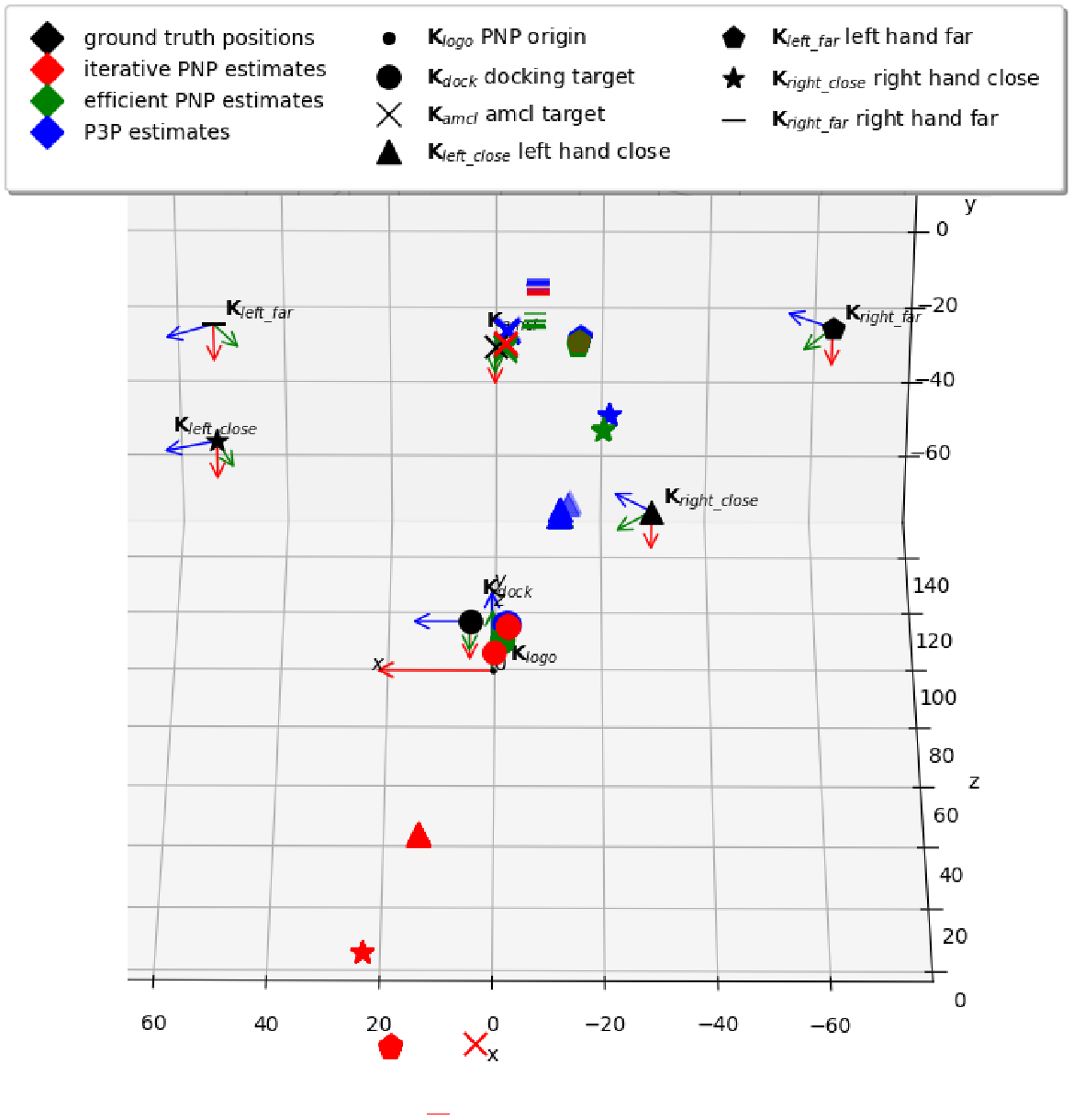
My research lies in the intersection of classical Computer Vision, Deep Learning and Computer Graphics. The goal is to develop novel methods for highly generic object pose estimation. We are specifically interested in the geometry of objects and exploit rendering engines to generate large quantities of synthetic data.
Before I joined TU Wien, I received both the BSc. and MSc. in Mechatronics/Robotics from the University of Applied Sciences Technikum Vienna (with distinction).
News
| Jan 26, 2026 | A comprehensive study on rotation representations for pose estimation of symmetric objects has been accepted as a regular paper in IJCV, as part of my PhD. Sourcecode is already available here. OpenAccess publication is coming soon! |
|---|---|
| Dec 02, 2025 | Our next ICBINB workshop will be held at ICLR 2026 in Rio de Janeiro, focused on the shortcomings of LLMs. Thanks to all authors and reviewers making it possible! |
| Oct 09, 2025 | Proceedings of our ICLR 2025 ICBINB workshop published in PMLR volume 296. |
| Apr 28, 2025 | Co-organized the ICBINB: Challenges in Applied Deep Learning workshop at ICLR 2025. |
| Mar 24, 2025 | We (CVL - TU Wien) showcased our human pose imitation system using a Pepper robot at the science fair Wiener Forschungsfest 2025, as part of the Caring Robots project. |
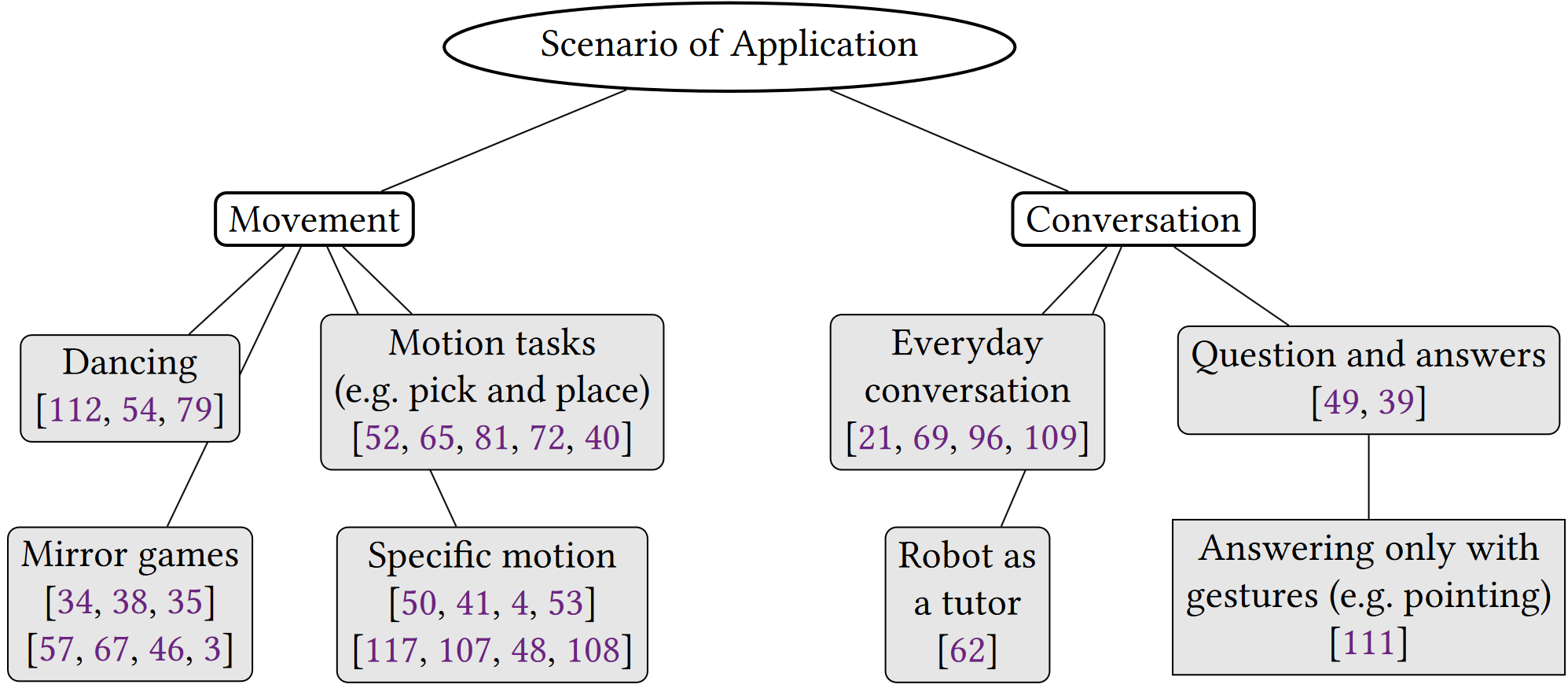
| Oct 23, 2024 | Review paper on body movement imitation published in ACM THRI. |
| Aug 04, 2024 | Proceedings of our NeurIPS 2023 ICBINB workshop published in PMLR volume 239. |